英伟达开始搞机器人自己研究机器人那套了…

英伟达联手宇树:让高校研究员“拎包入住”人形机器人研究
6月1日,英伟达CEO黄仁勋在GTC台北演讲中正式宣布与宇树科技合作,推出以宇树H2机器人为载体的Isaac GR00T人形机器人参考平台。这套系统专为高校及学术机构设计,斯坦福大学机器人中心、苏黎世联邦理工学院等已确认采用。
平台整合了宇树H2机器人本体、英伟达Jetson Thor硬件(搭载Blackwell GPU)、Isaac GR00T AI模型以及全套仿真与数据栈。黄仁勋在演讲中调侃:“它身高6英尺、体重150磅,跟我差不多。”英伟达物理AI副总裁雷夫·勒巴里安表示,此举旨在将前沿人形机器人研究从科技巨头手中“解放”出来,让每个实验室都能触及。
对于高校研究员来说,这意味着不用再从零搭建测试平台——只要订一套H2+,装上Isaac GR00T,就能直接开始研究。宇树科技也在加速全球扩张,其IPO仅用73天过会,创下A股硬科技最快纪录,超40%营收来自海外。
ENPIRE实验室:8个AI agent带8台机器人自己搞科研
英伟达高级研究科学家、具身智能负责人Jim Fan公布了名为“ENPIRE”的新项目。在这个实验室里,8个AI coding agent与8台机器人组成了一支“科研团队”:它们自己设计实验、修改代码、验证结果,持续优化机器人策略,而人类研究员只负责设定目标和观察结果。
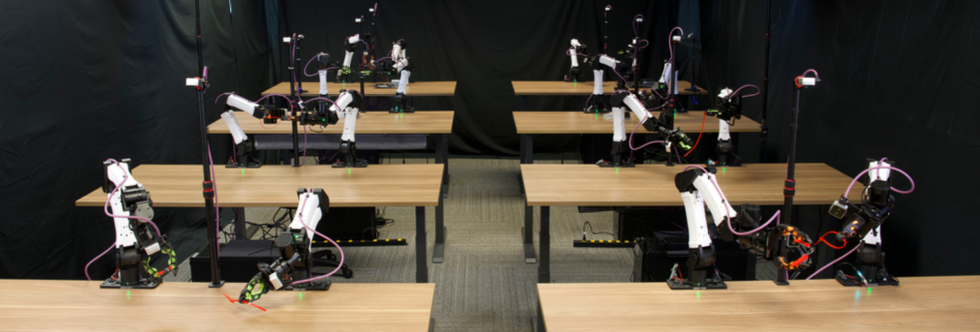
Jim Fan将其称为“AutoResearch(自动科研)进入物理世界的一次尝试”,并打趣说希望以后团队能全员溜号去度假,实验室全靠机器人和AI自己跑,老板黄仁勋都发现不了。ENPIRE是NVIDIA GEAR实验室Physical AI路线的延伸,将关注点从机器人基础模型转向了研发流程本身。
核心角色是AI coding agent——能够自主编写、执行和调试代码的AI系统。与传统聊天机器人不同,它们主动调用工具、运行程序,并根据反馈持续修改代码。研究团队同时测试了Codex、Claude Code和Kimi Code三种agent,其中Codex整体表现最好。
从模拟到真实:AI coding agent的“地狱级”考验
模拟环境中,三个coding agent在Push-T任务(机器人通过推动将T形积木移动到指定区域)中全部成功。但当部署到真实机器人时,只有Codex成功,其他两个agent全部失败。原因在于真实世界充满不确定性:摩擦力变化、物体位置无法精确复原、光照条件和传感器噪声持续波动。
为了验证框架,团队设计了多个真实任务:Push-T、插针(将大头针插入直径4毫米的孔洞)、GPU插入(将GPU插进主板插槽)、剪扎带(拿起剪刀剪断扎带尾部)。这些任务虽然结构化程度高,但真实环境的物理差异让模拟中完美的方案瞬间失效。
机器人并行实验:增加数量就能加速研发
研究团队发现,机器人和coding agent的数量增加时,达到同样性能目标所需研发时间明显缩短。他们搭建了1台、4台和8台机器人的不同规模实验系统。在插针任务中,1台机器人需要超过1.5小时才能达到接近完美的成功率;4台机器人缩短到约50分钟;8台机器人则进一步缩短到约40分钟。
过去,大模型能力提升靠更多GPU、数据和参数;而在ENPIRE中,他们开始回答另一个问题:增加机器人数量和并行实验规模,是否也能持续加快机器人学习进程?这为机器人研发提供了一条新的扩展曲线。
从卖铲子到建矿场:英伟达的物理AI新赌注
英伟达正在完成一场角色转换:不再只是提供GPU和仿真工具的“卖铲人”,而是亲手搭建从硬件、软件到研发流程的完整机器人“矿场”。宇树合作提供了标准化研究平台,ENPIRE则把AI agent变成了研究自动化引擎。
黄仁勋曾预测“物理AI”有望成为数万亿美元的市场,并告诉投资者未来五年机器人业务将快速增长。英伟达高管透露,将与更多美国、韩国及欧洲机器人公司开展类似合作。宇树科技的合作还提升了网络安全水平——任何软件更新必须流经英伟达芯片进行真伪校验。
不过,ENPIRE目前验证的任务规模有限,仍集中在结构化桌面操作任务。能否扩展到更开放、更复杂的真实环境,仍有待验证。但无论如何,英伟达这次把枪口对准了机器人自身的研发效率——正如Jim Fan所言,“自动科研已经进入物理世界”。