百度地图将推出沉浸式车位级SR导航,实现“车位到车位”全场景无缝体验

背景:导航技术持续进化,用户需求驱动产品升级
近年来,随着智能驾驶和高精地图技术的快速发展,用户对导航的精度与沉浸感提出了更高要求。传统的2D或车道级导航已难以满足复杂城市交通和精准泊车的需要,尤其是在地下车库、狭窄路段等场景中,导航指引存在断层问题。百度地图作为国内领先的地图服务提供商,持续投入实景增强(SR)技术的研发,致力于通过多传感器融合与3D可视化技术,为用户提供更加直观、精准的导航体验。
- 用户痛点明显
停车过程中,导航系统常在停车场入口或复杂路口失去指引,导致用户需手动寻找车位。 - 技术积累推动变革
百度地图依托AI算力、SLAM建图和多模态感知能力,为SR导航的落地打下坚实基础。
沉浸式车位级SR导航详情
百度地图宣布将在下半年推出沉浸式车位级SR导航,其核心目标是实现从出发地车位到目的地车位的全流程可视化导航,覆盖“有图”和“无图”场景,突破现有导航产品的限制。
-
核心技术亮点
- 多传感器融合:通过激光雷达、摄像头、超声波雷达等数据,构建真实感强的3D环境。
- 场景重构能力:在无高清地图覆盖区域也能通过实时感知生成沉浸式导航画面。
- 车位级精度:导航可精确到具体停车位,解决最后100米泊车路径指引难题。
-
全场景无缝体验
- 实现从城市道路、高速、匝道,到停车场、地库、车位的全流程导航。
- 融合行车与泊车功能,无需切换应用或模式,提升操作便捷性。
与其他产品的对比与融合趋势
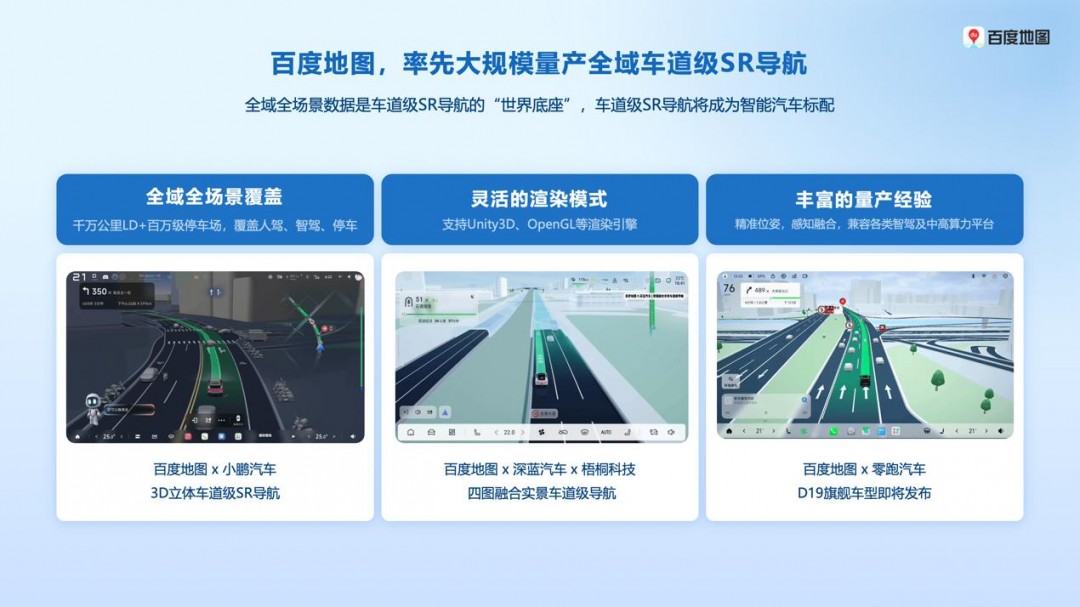
百度地图此次推出的车位级SR导航,并非孤例。例如深蓝L06车型已实现“四图融合实景导航”,将基础导航、车道级导航、SR渲染和场景重构融为一体。
-
行业趋势
- 多图层融合成为主流:导航系统不再局限于路径指引,而是强调视觉沉浸与信息整合。
- 实时感知与地图数据结合:从依赖预设地图向“感知+地图”混合模式演进。
-
差异化优势
- 百度地图具备更广泛的地图数据与AI能力,可在更多复杂场景中提供一致体验。
- 支持跨平台、多设备接入,适用于不同品牌与车型的智能座舱系统。
功能升级与泊车场景优化
在“车位到车位”导航之外,百度地图也对泊车功能进行了优化,例如:
- 狭窄区域泊车
支持在30米范围内精准倒入1.5米宽的极窄车位,大幅提升实用性。 - 360°影像界面精简
移除方向监测图标等干扰元素,提升视觉清晰度与操作专注度。
这一系列升级不仅增强了泊车场景的引导能力,也为未来实现P2P全自动泊车导航奠定基础,进一步向“无人驾驶最后一公里”迈进。
行业影响与未来展望
百度地图此次推出沉浸式车位级SR导航,标志着导航产品从“路径引导”向“体验引导”的重要转型,也将对智能汽车与自动驾驶行业产生深远影响。
-
对智能座舱的推动
- 提升人机交互体验,增强用户对导航系统的信任。
- 为车企提供标准化、高可用的导航解决方案,降低系统开发门槛。
-
对自动驾驶的意义
- 为L2+以上级别自动驾驶提供更完整的环境感知补充。
- 增强用户对智能驾驶功能的接受度,促进技术落地。
未来,随着百度地图持续完善SR技术与实景导航能力,或将推动整个导航与智能出行生态向“无感化、沉浸式”演进,真正实现从起点车位到终点车位的无缝出行体验。