高德全量开源具身操作基座模型ABot-M0

高德近日正式对外宣布全量开源具身操作基座模型ABot-M0,此举标志着其在具身智能领域迈出了关键一步。该模型旨在解决当前机器人在部署与操作中遇到的形态适配、场景迁移和数据孤岛等难题,为不同形态的机器人提供统一的“通用大脑”,推动机器人操作能力的普及与标准化。
开源内容与技术亮点
ABot-M0的开源包括三大核心维度:数据、算法与模型。这种全量开源的模式在行业内较为少见,体现出高德对生态共建的重视与开放态度。以下是主要技术亮点:
- 统一架构设计:采用通用神经网络结构,适配多形态机器人,如双臂、单臂、移动底盘等。
- 动作流形学习(AML)算法:通过学习真实操作轨迹,提升动作生成的连贯性和环境适应能力。
- 3D感知模块:增强空间理解能力,使机器人能更精准地感知和操作三维环境。
- 大规模数据支持:模型训练整合了600万条真实操作轨迹,极大提升了泛化能力。
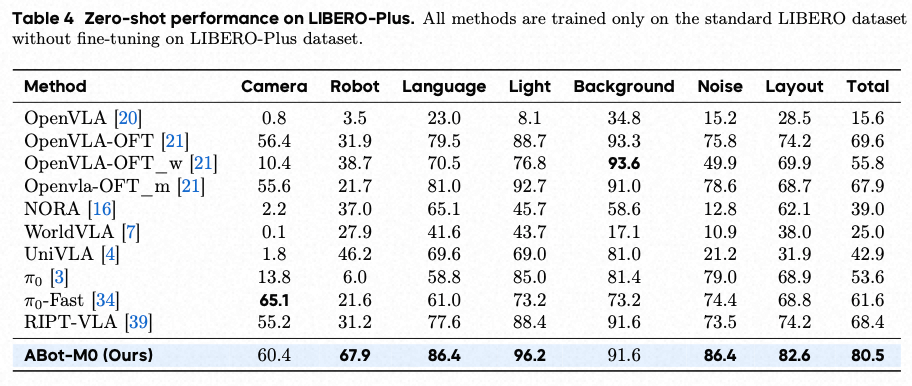
Libero-Plus基准测试表现
ABot-M0在具身智能领域的重要基准测试Libero-Plus中取得了80.5%的成功率,这一成绩远超前代模型,显示其在任务执行和场景理解方面的显著进步。
技术背景与研发动机
具身智能(Embodied Intelligence)作为AI与机器人技术的融合前沿,强调让机器具备感知、决策与操作的综合能力。然而,当前大多数机器人模型受限于特定硬件形态与封闭数据集,导致难以实现真正的通用操作能力。
高德推出的ABot-M0正是为了解决这些问题而设计。它不仅突破了数据孤岛,还提供了一个“开箱即用”的通用技术基座,降低了开发者与研究者在不同平台之间迁移与部署的门槛。
行业影响与未来展望
高德全量开源ABot-M0,将带来以下几方面的影响:
- 促进技术共享:通过开放数据与算法,推动学术界与工业界协同创新。
- 降低开发成本:提供统一模型框架,节省针对不同机器人平台定制模型的时间与资源。
- 提升应用灵活性:适配多种形态机器人,助力服务机器人、工业机器人等领域实现更广泛落地。
未来,高德计划持续优化ABot系列模型,并与更多机器人厂商、研究机构合作,推动具身智能在复杂任务、多模态交互和自主学习方面的深入发展。