英伟达机器人自学“装显卡”:把 AI 带到现实世界直接放养,还要开源

机器人自学装显卡:AI 开始动手“改造”世界
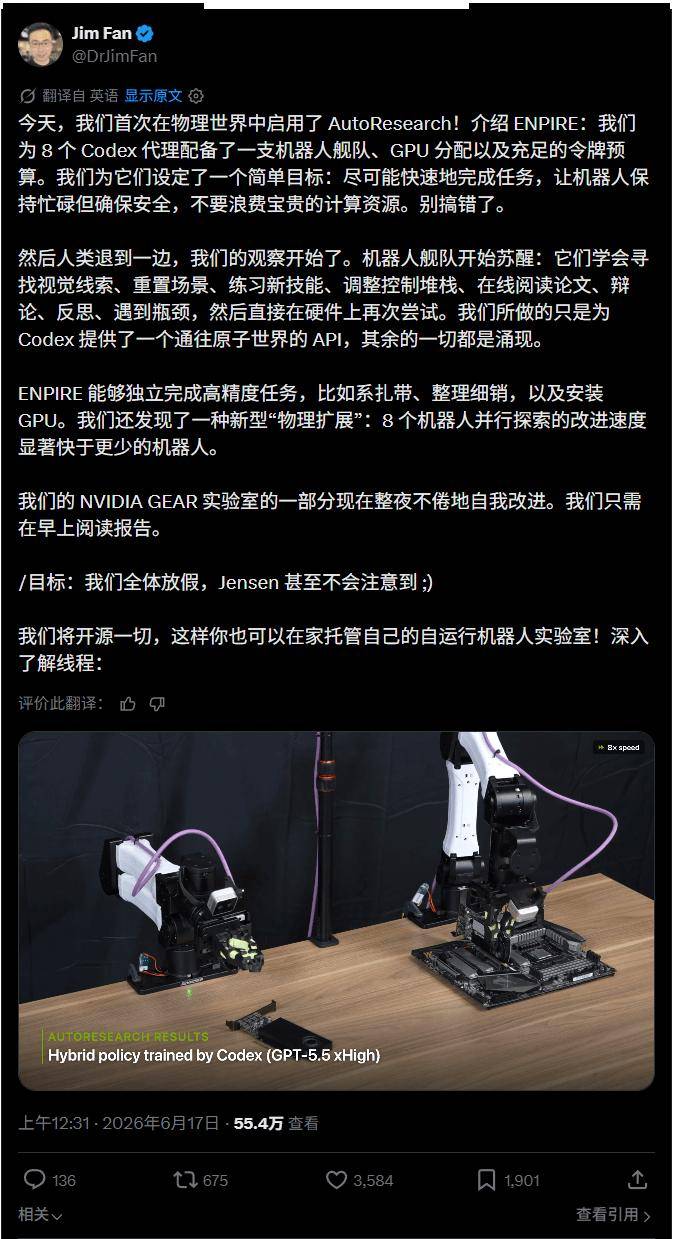
英伟达最新公开的研究表明,其机器人已能通过自我强化学习,完成将显卡插入机箱、拧螺丝等精细组装任务。与以往依赖大量人工标注或虚拟仿真的方法不同,这套系统允许机器人在真实物理环境中“放养”——即不预设详细的动作路径,而是让AI通过试错和奖励信号自主学会完成操作。这种“自学装显卡”的能力,标志着机器人从“程序化执行”迈入“自主适应”阶段,机器人可以像人类一样通过实践掌握新技能。
从虚拟到现实:AI 首次被“放养”在真实物理世界
在传统机器人研发中,模型通常先在仿真环境训练再迁移到现实(Sim2Real),但仿真与现实之间存在“鸿沟”。英伟达这次的关键突破在于直接在现实世界中训练——机器人用摄像头感知环境,实时调整抓取力和角度,一边操作一边自我修正。这种“放养”模式大幅降低了对预标注数据的依赖,让机器人能泛化至从未见过的硬件连接场景。与此同时,开源计划将提供此类训练框架,任何开发者都能复现类似“让AI自己动手拧螺丝”的自主操控能力。
个人开发者已先行:AI Agent 自主完成 A 股量化交易巡检
英伟达的技术理念并非孤例。一名个人开发者在WSL2 Ubuntu中部署了开源AI Agent(Hermes),让该Agent每天定时自动执行Python量化脚本,包括跑评分、分析持仓盈亏、检测技术面信号,最后通过钉钉Webhook推送报告。虽然这个Agent运行在虚拟环境而非物理世界,但本质与英伟达“放养”逻辑一致:AI自主理解任务目标、调用工具、处理异常,并将结果直接作用于真实世界(手机接收报告)。这印证了“在现实世界中放养AI”的可行性,只是当前应用场景从硬件组装扩展到了金融交易。
开源计划引发社区热望:人人都能“放养”自己的机器人
英伟达承诺将相关机器人训练代码、传感器数据采集工具及基础模型开源。这意味着,无论是科研人员还是极客爱好者,都能在自己的机器人大脑里部署“自学装显卡”的AI,并定制化“放养”场景。参考Hermes Agent的开源模式(开发者可自行修改任务脚本),未来物理机器人社区可能会涌现出大量DIY案例——比如让机器人自学更换摄像头、组装乐高,甚至像量化Agent一样自主完成复杂的操作流程。开源生态将极大降低物理世界AI应用的门槛。
当“放养”成为常态:AI 机器人将重新定义生产力
从自学装显卡到自主量化交易,放养式AI正从两个平行维度逼近现实:一端是英伟达代表的物理机器人,直接改造物质世界;另一端是Hermes Agent代表的软件Agent,管理数字资产。英伟达这次开源的决定,可能催生一个“物理世界Agent开源生态”——任何人都可以让机器人在家中自学组装家具、在仓库里自主分拣货物。当AI不再被笼养在虚拟仿真里,而是真正“野化”到现实环境中,每个螺丝刀、每份交易数据都可能成为它进化的养料。