20万条4D交互数据+运动学锚定,南洋理工让生成式仿真不再「脑补」机器人动作

仿真器的“脑补”困境与数据的崛起
在机器人技术的探索中,低成本训练是大规模应用的前提。为了替代昂贵的物理硬件测试,研究者通常依赖仿真器(Simulator)来模拟机器人与环境的交互。然而,传统仿真器存在明显的局限性。由于物理引擎的简化或场景建模的不足,它们往往难以完美复现真实世界中复杂的物理规律。这种失真导致仿真与现实之间存在巨大的鸿沟,模型在虚拟环境中训练出的策略,一旦部署到真实世界,往往表现得不知所措。
为了弥补这一鸿沟,生成式模型被寄予厚望。机器人训练离不开生成式模型,因为我们不可能收集到足够多的真实场景数据。但生成式模型极易“胡说八道”,如果没有强有力的约束,它很容易生成违背物理定律的“脑补”动作。为了强制模型生成符合逻辑的运动,研究者们通常会引入物理先验知识进行引导和约束。
南洋理工的突破:Robo4D-200k 数据集
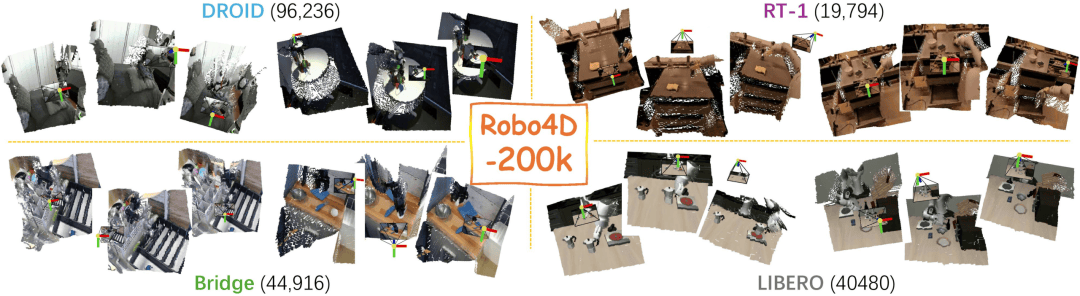
为了解决数据稀疏和质量不高的问题,南洋理工大学的研究团队构建了目前规模最大的4D机器人数据集——Robo4D-200k。
这个数据集就像是机器人学习领域的“百科全书”,它包含超过20万个高质量的机器人交互场景。与传统数据集不同,Robo4D-200k 捕捉了机器人在三维空间中随时间变化的动态过程(即4D信息)。如此大规模且高质量的数据覆盖了极其丰富的交互情境,为生成式模型提供了坚实的训练基础,使其能够学习到更加泛化和精准的运动模式。
关键技术:运动学锚定(Kinematics Anchoring)
数据量固然重要,但如何确保生成的动作“站得住脚”才是核心难题。为此,研究团队引入了运动学锚定(Kinematics Anchoring)技术。
这一技术的核心在于利用运动学信息作为“锚点”,严格约束生成过程。具体来说,研究者提出了一种能够仅凭运动学信息就能区分人形机器人和人类姿势的框架。这意味着模型被强制学习和遵守刚性机器人的物理限制(如关节旋转范围、连杆长度等),防止其生成像人类一样柔软或不切实际的动作。
为了评估这种约束的有效性,团队还推出了专门的人类-人形机器人运动(HHMotion)数据集,包含1000个运动样本,专门用于测试模型在区分和生成正确人机运动方面的能力。
拒绝“脑补”,迈向真实交互
通过结合 Robo4D-200k 的海量真实交互数据与 运动学锚定 的严格物理约束,南洋理工大学的这项研究成功构建了一个更健壮的生成式仿真框架。
这套方案让生成式仿真不再仅仅依赖于模型的“脑补”或猜测,而是在强大的数据驱动下,精准地预测和模拟机器人的动作。这种技术的进步,不仅弥合了仿真与现实的差距,也为未来机器人在复杂环境下的自主学习和适应能力奠定了重要的基础。